江苏大学电气信息工程学院的研究人员孙宇新、沈启康等,在2018年第13期《电工技术学报》上撰文指出,无轴承电机是集旋转与悬浮于一体的新型电机,在转矩绕组和悬浮力绕组磁场的共同作用下实现转子的稳定悬浮。无轴承电机具有成本低、齿槽脉动转矩低、结构简单、弱磁调速范围宽等优良特性,非常适合应用于高速精密数控机床及高压密封泵等高速驱动的高新技术领域。
无轴承异步电机通常采用气隙磁场定向控制实现动态解耦控制[1]。为了实现转矩和径向悬浮力之间的解耦控制需要准确检测转子的转速。传统的异步电机通常在转轴上安装机械式传感器或光电编码器来检测转速,但无轴承异步电机稳定运行时转子处于自悬浮状态,转子位置、速度及径向位移更容易产生振动和突变,在转轴上安装传感器会严重影响电机性能,因此无轴承电机的无速度传感器研究问题已成为无轴承电机技术进一步发展的关键技术之一。如何实现平稳及负载突变状态下转子转速的准确估计是无轴承电机无速度传感器研究的重点。
近几十年来,国内外学者研究的无速度传感器控制方法主要有滑模观测器法[2,3]、神经网络法[4]、高频信号注入法[5,6]、模型参考自适应法[7,8]、扩展卡尔曼滤波器(Extended Kalman Filter, EKF)算法[9-12]等。其中EKF算法不受电压直流偏移量的影响,可有效抑制噪声,估计精度高,估算范围广,因此在电机无速度传感器控制中得到了广泛应用。
但EKF算法抗干扰能力较差且对电机参数敏感[13],在电机运行过程中电机参数会随温度、频率和负载的变化发生改变,从而影响无速度传感器的性能,因此如何提高卡尔曼滤波器的鲁棒性能成为目前的研究热点。
针对此问题,文献[14]提出了一种基于抗差扩展卡尔曼滤波器的转速估计方法,在扩展卡尔曼滤波器的基础上引入抗粗差环节,可以使系统遇到干扰时更快收敛,但该方法主要是针对定子电压和状态向量中的干扰,并没有考虑到电机本身参数的变化。文献[15]设计了一种鲁棒卡尔曼滤波和自适应转速估计,减小了参数变化对系统稳定性的影响。但该方法在增强系统鲁棒特性的同时也影响了参数准确时的估计精度。
文献[16]提出一种改进SRUKF滤波,通过引入时变渐消因子和弱化因子,实时修正滤波增益矩阵和误差协方差平方根矩阵,使系统在状态突变或负载扰动时具有更强的鲁棒性,但该算法过于复杂,运算量较大,且只在电机参数变化较小的情况下适用。
为了在不影响转速估算精度的情况下减小电机参数变化对转速估计的影响,增强系统的鲁棒性,本文提出了一种新型扩展卡尔曼滤波器,将电机参数作为待辨识状态向量增广到系统模型中,分别构造三个状态方程串联起来,在每个采样周期内交换参数实现实时的检测,使系统稳定运行。该方法算法简单,并能有效减小电机参数变化对转速估计的影响。仿真和实验结果验证了算法的有效性。
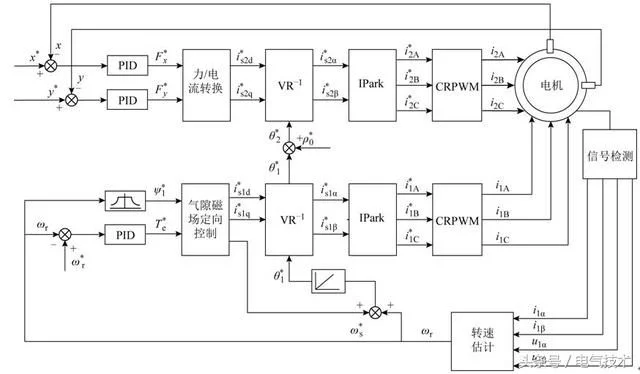
图4 无轴承异步电机的控制框图
图15 实验装置照片
作者最后指出,本文针对传统无轴承异步电机的无速度传感器矢量控制精度受制于电机参数敏感易变的不足,提出了一种新型串联扩展卡尔曼滤波器。将电机参数作为待辨识状态向量增广到系统模型中实现电机参数的在线检测,采取三个降阶状态方程的串联结构,在每个采样周期内检测并交换电机参数,不仅能够减小电机参数变化对转速估计的影响,提高系统的精度和性能,还能减小芯片的计算负荷,增强算法的实用性。
对所提方法分别进行了仿真和实验验证,并将结果与传统EKF进行了对比,实验结果显示:当转子电感Lr和转子电阻Rr发生变化时,采用新型串联卡尔曼滤波器相对于传统EKF能有效降低稳态估计误差和偏移,确保系统稳定运行。但为了确保转速估算精度,这种新型串联扩展卡尔曼滤波器建立在电机的六阶状态方程的数学模型上,在增广后计算量较大,因此如何在降阶的数学模型上应用该方法将是下一步研究的问题。