垂直关节机器人手臂,一般都需要平衡装置,以减小驱动器的负荷和缩短启动时间。机器人所采用的平衡机构有以下几种:配重平衡机构、活塞推杆平衡机构、弹簧平衡机构这三种。今天小编主要给大家分享一下弹簧平衡机构的润滑部位与保养周期。这种平衡装置结构简单,平衡效果好,易于调整,工作可靠,但增加了机器人手臂的惯量与关节轴的载荷。一般在机器人手臂的不平衡力矩比较小的情况下采用这种平衡机构。
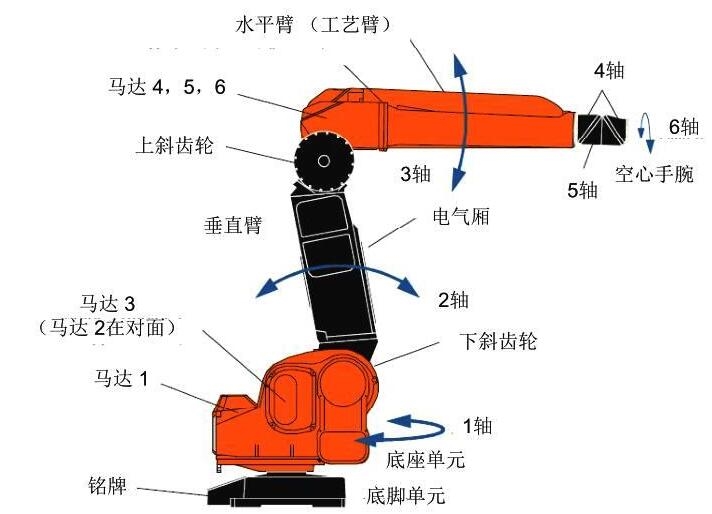
在机器人机设计中,特别是有回转关节的地方,就需要利用力矩平衡原理来进行机构的设计。假设一台极坐标的机器人在设计时没有考虑臂的平衡问题,机器人的臂端还有手腕,在进行作业时尚需要装末端执行器或夹持器及重物。此时回转轴前端的重力就远远大于回转轴后部的重力。根据力矩平衡原理知道整个臂部处于不平衡状态,在无驱动动力时,前端就会自然落下,容易引起事故的发生。而在选择驱动电机功率时,逆时针回转所需力矩就很大,而顺时针回转由于重力的作用则很小,所以电机输出功率波动很大,而其额定功率又要按最大力矩来设计。此时工作起来就不平稳。因此在机器人操作机的设计中一定要考虑平衡问题。在喷涂机器人中常用的平衡方式有弹簧平衡系统。这是一种动态的平衡方式,它同样是利用力矩平衡的原理来进行设计的。设AB是手臂的一部分,AC是支座,中间有铰接点A与手臂相连接。臂的重心在G处,其重量为M。AG的长度为L1,AB的长度是L。BC是拉力弹簧及其附件,弹簧与臂在B点铰接,与支座在C点铰接。支座CA与臂AB连线之间形成夹角θ,弹簧与臂AB连线的夹角为δ。由于拉力弹簧受到拉长形成一个拉力F。根据力矩平衡原理,必须使拉力F与弹簧拉力作用线至A点的距离的乘积等于手臂重量M与重心G至AC的距离的乘积,整个系统才能平衡,亦即必须满足下列公式:M·L1·sinθ=F·L·sinσ由于机器人作业时,手臂是围绕A点转动的,因此θ角是一个变量。同时由于手臂的转动,使B点到C点的长度改变,因此拉力F也是一个变量,δ角也是随θ角改变的变量。但结构设计时,在三角形ABC中,AC和AB的长度都已确定,因此当θ角位置一定,δ角也可求出。根据任意三角形正弦和余弦定理可得到公式因此力矩平衡公式也可写成因此只要在进行结构设计时,使弹簧的拉力符合公式的函数关系时,就能使系崐统在任何位置上都获得平衡。但实际上由于结构的限制、弹簧材质的影响,回转关节摩擦力矩以及是否合理润滑的影响以及其它很多因素的关系,需要增加很多系数。即使这样也只能得到在某一区域内的平衡。为了满足机器人发展的不断需求,比瑟奴润滑剂针对不同工况的机器人平衡开发出了多款专用产品,Pseinu®(比瑟奴) B.GREASE-109/JR 机器人平衡弹簧机构轴承润滑脂 是由全合成基础油,并添加(PSEINU)公司独有的液态离子聚合物,以及抗氧、防锈等添加剂,经特殊工艺制造而成。开发用于重载码垛机器人的新型弹簧平衡机构轴承与平衡弹簧杆使用。1.为机器人平衡杆定制的,含有A“粘性”添加剂、抗磨剂;2. 可使油脂在回流温度(倒灌),不会聚在平衡杆的一端;3. 特殊结构改进剂,具有优异的水平和垂直附着力;4. 满足机器人平衡杆及平衡杆轴承使用,保养周期5000小时。工业机器人中另一种常用的平衡方式是气动平衡,一般机器人的大臂常采用此种方式。设大臂AB与支座铰接于O点,在大臂的尾部安装有一气缸,气缸的活塞杆与支座铰接于O2点,气缸的缸体与连杆铰接于O1点,连杆的另一端与大臂铰接于O3点。当气缸与气路相通,在缸体上产生一个向下的压力F,而F的大小又满足力矩平衡原理时,大臂就处于平衡状态。而当大臂绕支点转动时,气缸的缸体也随之上下摆动。由于活塞杆是固定在支座上的,因此当缸体上下摆动时,压力F也随之变化,产生一个与大臂转动方向相反的平衡力矩,使大臂在动态情况下仍处于平衡状态。针对焊接机器人平衡缸的润滑,比瑟奴润滑剂研制出了一款,耐高温的润滑脂,Pseinu®(比瑟奴) B.GREASE-113/JF 机器人平衡缸活塞杆润滑脂 是一种全新开发合成的二合一式密封润滑脂,具有优良的化学惰性及氧化稳定性,是机器人行业中使用的一种高效、长寿命的润滑脂,用于高温环境下的焊接机器人的重力平衡机构平衡缸活塞杆使用。具有优异的的气密性、耐高温300度、化学安定性和机械安定性;2.在温度变化的环境下耐用,可长时间保持稳定扭矩;3.与密封材料EPDM橡胶相容好,不会导致膨胀或者收缩;4.对烃类气体和氢的溶解度小,与液压油不相溶性;5.良好的静态密封和动态密封润滑性能。广泛用于气缸活塞的密封件和缸筒摩擦副的长寿命润滑。包括,油缸油封、液压制动缸等。在机器人系统中经常采用几种平衡方式,且由于在机器人结构设计中采用了平衡系统,可使机器人减小驱动电机的功率,降低功率的波动,使机器人工作时平稳,提高了机器人的动态性能。